

在 Orange Pi AIpro 上运行 AI 项目,最关键的一步就是将通用的 ONNX 模型转换为昇腾 NPU 专用的 .om 离线模型。本文使用yolov8m-pose.pt模型为例。
本文总结了最稳妥的转换流程,帮你彻底解决转换报错和性能瓶颈。
一、 核心整备:确保环境稳如泰山
转换中型模型(如 YOLOv8m)非常消耗内存。如果不提前设置,ATC 进程极易被系统“Killed”。
1. 开启 4GB 虚拟内存 (Swap)
这是转换成功的前提! 即使物理内存够用,交换空间也能缓冲 ATC 编译算子时的瞬时峰值。
sudo fallocate -l 4G /swapfile
sudo chmod 600 /swapfile
sudo mkswap /swapfile
sudo swapon /swapfile
free -h
# 验证:free -h 确认 Swap 行显示 4.0Gi 即可
2. 激活 CANN 工具链并安装相关库
每次打开新终端执行模型转换前,必须加载环境变量(环境变量配置请查看 Orange Pi AIpro (310B) NPU 开发环境搭建):
source /usr/local/Ascend/ascend-toolkit/set_env.sh
# 进入你的 conda 环境(如已配置)
conda activate ascend_atc
# 2. 安装 Ultralytics 核心库(包含 YOLOv8 所有导出工具)
pip install ultralytics
#验证atc
atc
这里报错不用管,输出ATC start working now, please wait for a moment.即验证成功。
二、 ONNX模型导出
不要直接使用默认设置导出 ONNX!昇腾工具链对最新的 ONNX Opset(如 v22)解析尚不完备。
1. 黄金导出指令 (Python)
在导出时必须显式指定 opset=11。这是昇腾各版本 CANN 兼容性最强、运行最稳的版本。运行以下命令会自动从 Ultralytics 官方服务器下载 yolov8m-pose.pt 到当前目录,并立即导出为昇腾兼容的 ONNX 格式,前提是开发板必须联网。
python3 -c "from ultralytics import YOLO; YOLO('yolov8m-pose.pt').export(format='onnx', imgsz=640, opset=11)"
📝 指令解析:
-
python3 -c: 直接在命令行运行引号内的 Python 代码。 -
yolov8m-pose.pt: 自动从官方下载 Nano 版姿态估计权重。 -
format='onnx': 指定导出格式。 -
imgsz=640: 设定模型输入分辨率(必须与后面 ATC 转换时的input_shape一致)。 -
opset=11: 最关键参数,确保昇腾 310B 的 ATC 工具链能够解析算子。
执行完后,当前目录下就会生成一个 yolov8m-pose.onnx 文件。
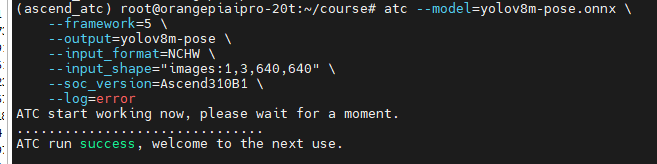
三、 ATC 转换:核心指令解析
拿到 opset=11 的 ONNX 后,使用 atc 命令进行编译:
atc --model=yolov8m-pose.onnx \
--framework=5 \
--output=yolov8m-pose \
--input_format=NCHW \
--input_shape="images:1,3,640,640" \
--soc_version=Ascend310B1 \
--log=error🔍 ATC 转换指令核心参数速查
-
--model:输入路径,必须是opset=11导出的 ONNX 文件。 -
--framework=5:框架类型,数字5专门代表 ONNX 格式。 -
--output:输出名称,执行后自动生成yolov8m-pose.om。 -
--input_format=NCHW:数据排布,YOLO 必须遵循“批次、通道、高、宽”顺序。 -
--input_shape:输入规格,需手动指定节点名(如images)及尺寸(1,3,640,640)。 -
--soc_version=Ascend310B1:芯片型号,Orange Pi AIpro 务必填写Ascend310B1。 -
--log=error:日志级别,设为error只显示关键报错,界面更清爽。
四、 避坑经验总结
-
No parser is registered…: 报错通常是因为 ONNX 的 Opset 版本太高。请退回到
opset=11重新导出。 -
Killed/OOM: 转换中途退出,说明 Swap 没开或者空间不足。
-
输出维度异常: 转换成功后,建议在 Python 中打印
model_desc。标准 YOLOv8-Pose 的输出维度应为(1, 56, 8400)。
没有回复内容