

紫光同创企业命题
快速上手Manus
题目名称:基于紫光同创FPGA的智能交通感知系统

赛题内容
随着城市的迅速发展,城市交通环境也变得更加复杂,行人行为及车牌识别作为智能交通的核心感知技术,在车辆通行管理、交通违章抓拍、ETC闸机、停车场自动化运维等场景中具有不可替代的作用。传统基于CPU/GPU 的行人和车牌识别方案存在实时性不足、功耗较高、部署灵活性受限等问题,而FPGA+MCU凭借并行计算架构、低延迟、高性价比的优势,成为嵌入式场景下智能交通感知系统的理想硬件平台
赛题要求
主要考察FPGA的图像预处理功能、PCIe传输、RK端模型部署优化能力。在RK3568有限的算力和资源限制下如何发挥FPGA的硬件加速能力,做到软硬件协同处理是重点考察。
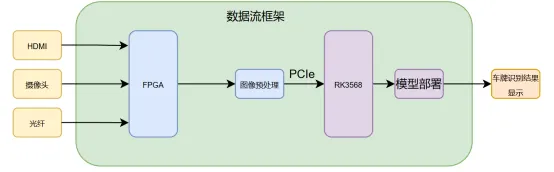
1. 硬件架构与数据流划分
- 多源视频接入(FPGA端):
√ HDMI:FMC转HDMI子卡实现1080P的HDMI视频源输入
√ 摄像头:40PIN的IO扩展双目OV5640。
√ 光纤:可以通过另外的fpga板卡采集视频流通过光纤传输。
- 高速数据通信(FPGA -> RK3568):
√ 建议使用PCIe 接口进行数据交互。FPGA 将定位并裁剪好的车牌 ROI(感兴趣区域)图像,或处理后的全帧图像及坐标,通过 PCIe DMA 直接写入 RK3568 的内存空间,RK3568从内存中取出图像数据并处理。
2. FPGA 端:图像预处理与车牌定位
- 在FPGA 上用纯 RTL 实现对应算法
·图像预处理:
√ 可以实现RGB 转 HSV,提取蓝色和绿色的特征掩膜、边缘检测:车牌区域具有丰富的垂直纹理。使用 Sobel 算子提取垂直边缘。形态学处理:对边缘图像进行闭运算。
√ 对于倾斜角度还需要fpga做矫正处理。强光情况下需要做可以实现基于局部自适应的 Gamma 校正,对于夜间增强可以采取直方图均衡等,高阶算法可以考虑使用clahe完成。远距离时,车牌区域实际分辨率降低,FPGA的识别效果不佳,可以考虑图像增强、放大车牌区域给到RK。
3. RK3568 端:AI 识别与分类
RK3568 主要负责对 FPGA 抠出的车牌图像进行语义级别的分析。
模型选择:
- 字符识别:推荐使用轻量级的LPRNet 或 CRNN。不需要复杂的目标检测,直接输入裁剪好的车牌图像,输出中文字符和字母数字。
- 车牌分类:可以通过一个极小的分类网络(如MobileNetV2 甚至简单的几层 CNN)来实现,或者直接根据 FPGA 端传入的 HSV 色彩判断结果进行综合判定。
- 低照度:可以RK部署相关模型实现低照度增强
- 远距离:该情况下车牌区域的分辨率相当于降低,RK可以针对该情况使用轻量级模型去完成识别。
输入源连接展示:

数据输入可以来自摄像头、光纤、FMC扩展HDMI输入子卡(后续推出),光纤数据来自另一块fpga采集板卡,该采集板同样可以支持摄像头输入(FMC扩展GPIO子卡接摄像头)、HDMI输入等;FPGA与RK3568的PCIe连接已经在核心板上,PCB已经完成互连。
没有回复内容